Außer der klassischen Nachführfunktion mit der
Möglichkeit zu manuellen Korrekturen über eine Handsteuerbox
soll die Steuerung der Newton-Montierung auch folgende Funktionen
bieten:
Anzeige der aktuellen Position des Teleskops in Rektaszension und
Deklination über "elektronische Teilkreise", d.h. die
Auswertung der in die Montierung integrierten Drehgeber
Eine Objektbibliothek mit Positionsdaten und einigen weiteren
Informationen zu Sternen, Planeten und Deep-Sky Objekten
Grafische Anzeige des Himmelsausschnitts an der aktuellen
Teleskop-Position
Unterstützung beim Aufsuchen von Objekten aus der
Objektbibliothek
Referieren der Koordinaten-Anzeige mittels Referenzsternen
Das beinhaltet unter anderem folgende Teilfunktionen:
Batteriebetriebene Echtzeituhr, mit Ermittlung der aktuellen
Sternzeit
Koordinaten-Transformation vom Teilkreis-System der Montierung
auf das Äquatorialsystem (Kompensation des Fehlers der
Polausrichtung)
Implementierung einer Datenbank mit Suchfunktion
Berechnung der aktuellen Mond- und Planetenpositionen
Grafikfunktionen zur Kartenausgabe
Das Steuerungskonzept beruht auf einer dezentralen Elektronik. Im
Gehäuse von Polachsen- und Deklinationsantrieb befindet sich eine
Platine zur Ansteuerung des jeweiligen Schrittmotors, und Auswertung
des Drehgebers. Das eigentliche Bediengerät mit Grafikdisplay und
Tastatur wird in der Hand gehalten. Hier werden die oben genannten
Funktionen realisiert.
Zum gegenwärtigen Zeitpunkt ist die normale Nachführfunktion
realisiert, sowie die Hardware des Bediengeräts.
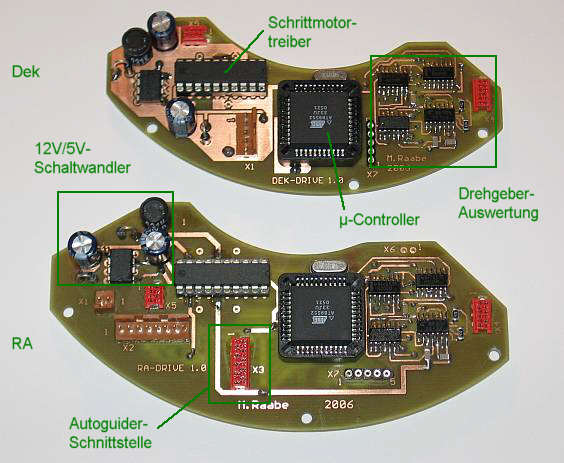
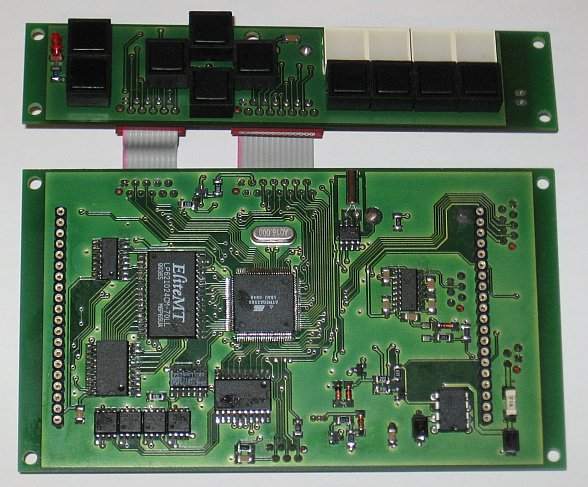
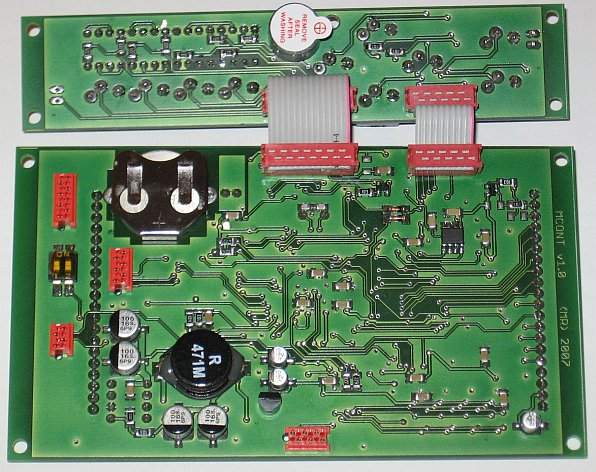
Die beiden Elektronik-Baugruppen für Deklination und Rektaszension:
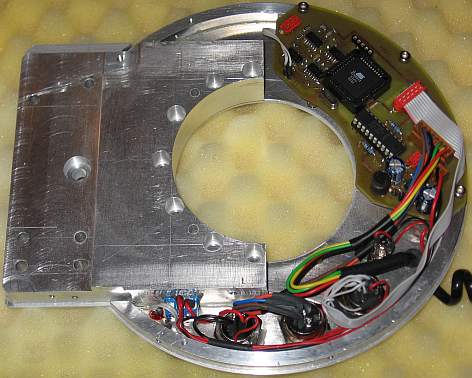
Eingebaut in den Rektaszensions-Antrieb:
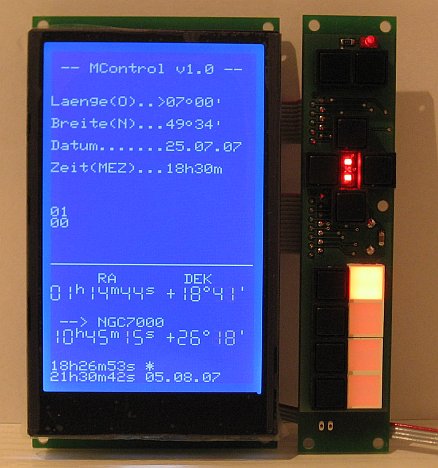
Die Elektronik des Bediengeräts in der SW-Entwurfsphase:
Die Elektronik besteht im wesentlichen aus einem ATMEGA Controller mit
Peripherie:
Update 10.02.2010
Inzwischen ist die Hardware fertig, die Software auf einem guten Stand,
und die ersten Praxiseinsätze am Teleskop sind erfolgreich
absolviert.